
Intelligent Transportation System
Enhanced Roadside Animal Detection System
Collisions involving large animals are a serious safety, economic and ecological concern. Some North American jurisdictions have installed a roadside animal detection system (RADS) that can warn the possible presence of large animals on rural highway sections. This study provides a conceptual framework for developing an enhanced RADS by proposing a threat analysis algorithm that integrates four input indicators (e.g., physical distance between animal and vehicle). The methodology was tested using real-world traffic and animal data collected from a conventional RADS in British Columbia, Canada. The enhanced RADS can disseminate varying levels of warning according to the estimated level of the threat rather than the constant level of warning generated by a conventional RADS. The enhanced RADS can also use a Vehicle-to-Infrastructure communication technology to establish direct wireless communication with vehicles at risk, for instance, to automatically control a vehicle’s speed to avoid a collision with a large animal.
Enhanced Roadside Animal Detection Systems
Protect Police Officers from Roadside Collisions
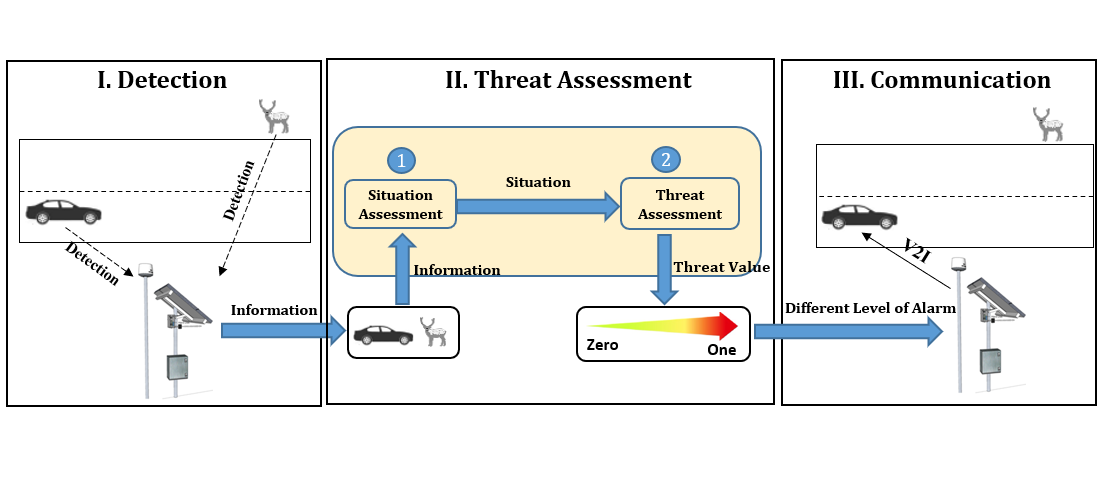
Police officers on duty on the road for traffic stops, vehicle collisions, traffic direction, etc. are exposed to the risk of being hit or even killed by a passing vehicle. This study proposes an Internet-of-Things (IoT) protection system for police officers on duty on the road. The development of the system envisaged involves three essential phases: 1) detection, 2) risk analysis, and 3) warning and communication. This study has focused on the risk analysis phase. We applied an AI algorithm that integrates four input indicators (lateral distance from police officer to traveled lane, magnitude of speeding, stopping sight distance, and direct distance) into a single estimate of the risk of a collision. The study used data from a real-world situation on Highway 416 in Ontario, Canada to demonstrate the application of the proposed model. The results clearly demonstrate that the proposed model can be used to generate risk estimates that could be used to give timely warning of a possible collision risk to police officers at work on a road.
Proposed Internet-of-Things System
