Virtual Reality Co-Simulation
Co-Simulation of Vissim and Unity
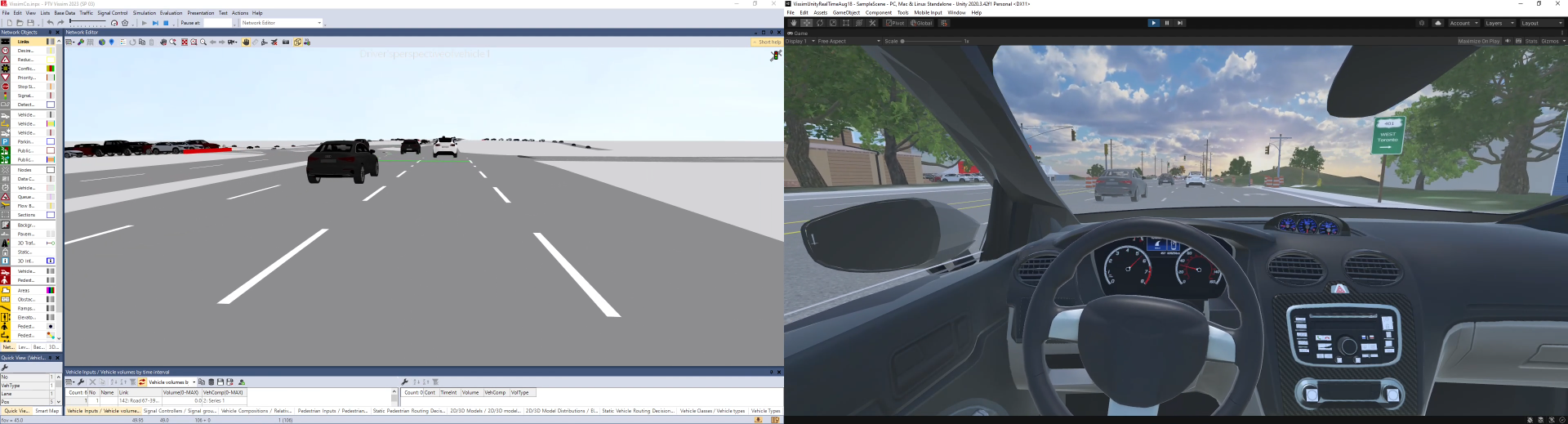
Integration of Vissim and Unity game engine (known as Co-Simulation) represents exchanging the data including trajectory coordinates (X, Y, Z) of cars/trucks in a fraction of a second (0.05 sec). This allows to develop a driving simulator where a human wears a Virtual Reality (VR) headset and through physical steering wheel and pedals controls a car/truck in Unity where all other traffic movements are coming from Vissim. This approach provides a more accurate representation of driver behavior by mimicking real-world situations in a controlled environment. The simulator can allow researchers to invite several users and receive quantitative (measure travel time and traffic conflict) or qualitative (survey) feedback. Our video showcases the Integration of Vissim and Unity as part of our project to evaluate the impact of intelligent lane utilization in HWY 401 in Municipality of Durham, Ontario
Co-Simulation of SUMO and Unity
While Vissim is mainly used by transportation planners for conducing traffic analysis; Simulation of Urban Mobility (SUMO) is used by automotive industry to test vehicular technology (V2V or V2I technologies). We observed that researchers invested considerable time, effort, and money in developing a co-simulation tool that integrated SUMO and Unity. Each study ‘re-invented the wheel’ and therefore sacrificed resources that could have been used to focus on the ultimate goal, i.e., improving traffic flow/safety. We developed Sumo2Unity, an open-source co-simulation tool helping other researchers. The tool includes: 1. the integration of SUMO and Unity (programming), 2. A 3D environment including 3D models of vehicles, traffic lights, and various road configurations, 3. a realistic interior design of a simulator vehicle and vehicle dynamics.